You've Got to Feel It To Believe It: Multi-Modal Bayesian Inference for Semantic and Property Prediction
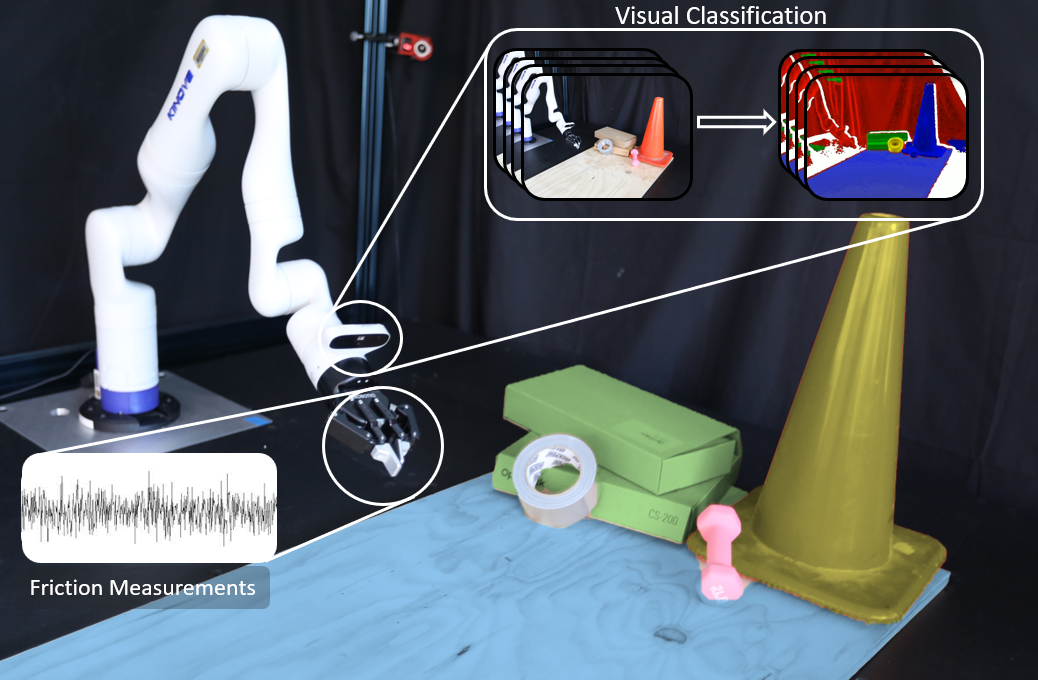
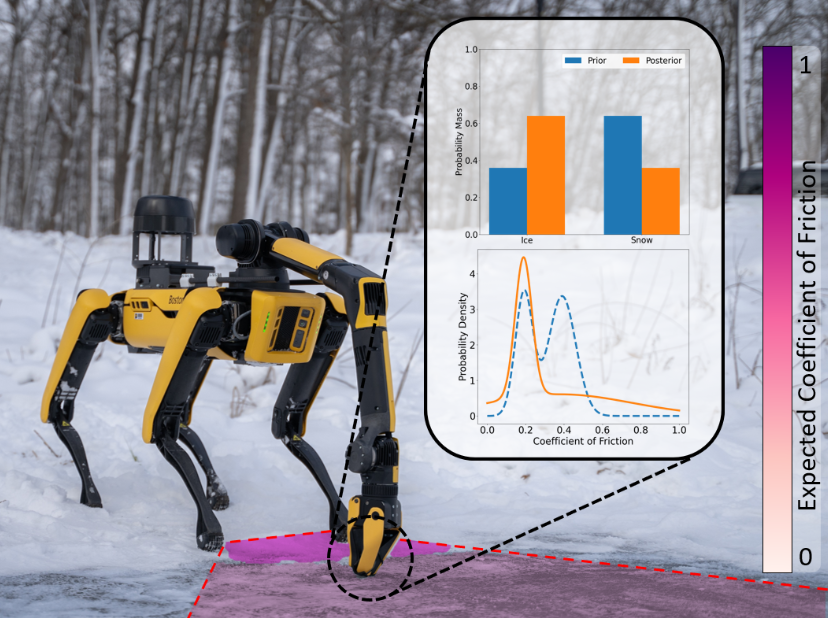
We incorporate both visual and tactile information to improve semantic maps for robots.

A collection of research projects I have contributed to. My work mainly focuses on active perception and high level control.